Productos
AGV - Vehículo guiado automatizado
Protección total de alto rendimiento Lurking AGV



El Robot móvil latente La serie mueve estantes o paletas de inventario a la estación de recolección mediante su mecanismo de elevación. Ha optimizado el rendimiento del movimiento y ha mejorado la protección de seguridad, ofreciendo soluciones de bienes a personas altamente productivas y rentables.
Para la rotación en el almacén o la conexión entre la línea de producción y el almacén, se selecciona el AGV de manipulación flexible para reemplazar las carretillas elevadoras tradicionales y otras herramientas de manipulación según la demanda del flujo. Kingmore forma inteligente la interacción de la información entre el sistema de manipulación, el almacén y la línea de producción, lo que puede garantizar la trazabilidad de la información en todo el enlace, crear una producción inteligente y flexible y reducir la demanda de uso manual.
1. Tipo de ascensor
El robot de elevación es un equipo de logística automatizado que puede realizar carga, elevación y transporte de forma autónoma. Se caracteriza por estar equipado con un dispositivo elevador, que puede elevar mercancías desde el suelo a una posición más alta para realizar tareas como manipulación y almacenamiento. Generalmente utilizado en aplicaciones de logística industrial y de almacenamiento, puede mejorar eficazmente la eficiencia de la producción y reducir los costos de logística.
Q2-400D | Altura de elevación (mm) | 60 |
| Carga especificada (kg) | 400 | |
| Navegación | Código QR/LSLAM | |
| Escalabilidad(°) | 3 | |
| Diámetro de rotación (mm) | 820 | |
| Tiempo de funcionamiento nominal (h) | 8 | |
| DimensionesL*W*H(mm) | 780*545*300 | |
| Velocidad de funcionamiento nominal (sin carga)(m/s) | 2.0 | |
| Peso (kg) | 93 | |
| Precisión de posicionamiento (mm,°) | ±10/±1 | |
| Tiempo de carga (h) | ≤1,5 | |
| Modo de conducción | accionamiento diferencial |
Q3-600D | Altura de elevación (mm) | 60 |
| Carga especificada (kg) | 600 | |
| Navegación | Código QR/LSLAM | |
| Escalabilidad(°) | 3 | |
| Diámetro de rotación (mm) | 995 | |
| Tiempo de funcionamiento nominal (h) | 8 | |
| DimensionesL*W*H(mm) | 950*650*250 | |
| Velocidad de funcionamiento nominal (sin carga)(m/s) | 2.0 | |
| Peso (kg) | 132 | |
| Precisión de posicionamiento (mm,°) | ±10/±1 | |
| Tiempo de carga (h) | ≤1,5 | |
| Modo de conducción | accionamiento diferencial |
Q7-1000E | Altura de elevación (mm) | 60 |
| Carga especificada (kg) | 1000 | |
| Navegación | Código QR/LSLAM | |
| Escalabilidad(°) | 3 | |
| Diámetro de rotación (mm) | 1200 | |
| Tiempo de funcionamiento nominal (h) | 8 | |
| DimensionesL*W*H(mm) | 1150*820*254 | |
| Velocidad de funcionamiento nominal (sin carga)(m/s) | 2.0 | |
| Peso (kg) | 172 | |
| Precisión de posicionamiento (mm,°) | ±10/±1 | |
| Tiempo de carga (h) | ≤1,5 | |
| Modo de conducción | accionamiento diferencial |
Q8-2000A | Altura de elevación (mm) | 100 |
| Carga especificada (kg) | 2000 | |
| Navegación | Código QR/LSLAM | |
| Escalabilidad(°) | 3 | |
| Diámetro de rotación (mm) | 1780 | |
| Tiempo de funcionamiento nominal (h) | 8 | |
| DimensionesL*W*H(mm) | 1523*1150*327 | |
| Velocidad de funcionamiento nominal (sin carga)(m/s) | 0,9 | |
| Peso (kg) | 550 | |
| Precisión de posicionamiento (mm,°) | ±10/±1 | |
| Tiempo de carga (h) | ≤1,5 | |
| Modo de conducción | accionamiento diferencial |
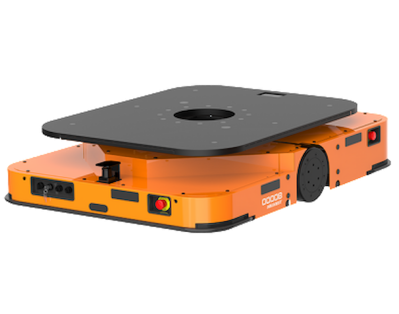
2. Tipo de chasis
El vehículo con chasis de robot latente es una plataforma de robot con funciones de expansión de capa superior y capacidades de movilidad del chasis. Su característica es que la mesa tiene sus propios orificios de montaje superiores y se proporciona una placa de interfaz integrada para que el mecanismo superior obtenga interfaces de hardware; puede adaptarse a una variedad de necesidades de expansión superiores, como rodillos, pequeños brazos robóticos, cámaras de inspección, equipos de detección ambiental, etc., y tiene funciones ricas. Las capacidades de expansión y desarrollo secundario se pueden utilizar ampliamente en diversos sectores industriales, de almacenamiento y de logística. fabricación inteligente y otros escenarios.
Q3B-600C-D | Altura de elevación (mm) | / |
| Carga especificada (kg) | 600 | |
| Navegación | código qr | |
| Escalabilidad(°) | 3 | |
| Diámetro de rotación (mm) | 995 | |
| Tiempo de funcionamiento nominal (h) | 8 | |
| DimensionesL*W*H(mm) | 950*650*300 | |
| Velocidad de funcionamiento nominal (sin carga)(m/s) | 2.0 | |
| Peso (kg) | 126 | |
| Precisión de posicionamiento (mm,°) | ±10/±1 | |
| Tiempo de carga (h) | ≤1,5 | |
| Modo de conducción | accionamiento diferencial |
Q3B-600L-D | Altura de elevación (mm) | / |
| Carga especificada (kg) | 600 | |
| Navegación | LSLAM | |
| Escalabilidad(°) | 3 | |
| Diámetro de rotación (mm) | 995 | |
| Tiempo de funcionamiento nominal (h) | 8 | |
| DimensionesL*W*H(mm) | 950*650*300 | |
| Velocidad de funcionamiento nominal (sin carga)(m/s) | 2.0 | |
| Peso (kg) | 126 | |
| Precisión de posicionamiento (mm,°) | ±10/±1 | |
| Tiempo de carga (h) | ≤1,5 | |
| Modo de conducción | accionamiento diferencial |
Q7B-1000C-E | Altura de elevación (mm) | / |
| Carga especificada (kg) | 1000 | |
| Navegación | código qr | |
| Escalabilidad(°) | 3 | |
| Diámetro de rotación (mm) | 1200 | |
| Tiempo de funcionamiento nominal (h) | 8 | |
| DimensionesL*W*H(mm) | 1150*820*300 | |
| Velocidad de funcionamiento nominal (sin carga)(m/s) | 2.0 | |
| Peso (kg) | 184 | |
| Precisión de posicionamiento (mm,°) | ±10/±1 | |
| Tiempo de carga (h) | ≤1,5 | |
| Modo de conducción | accionamiento diferencial |
Q7B-1000L-E | Altura de elevación (mm) | / |
| Carga especificada (kg) | 1000 | |
| Navegación | LSLAM | |
| Escalabilidad(°) | 3 | |
| Diámetro de rotación (mm) | 1200 | |
| Tiempo de funcionamiento nominal (h) | 8 | |
| DimensionesL*W*H(mm) | 1150*820*300 | |
| Velocidad de funcionamiento nominal (sin carga)(m/s) | 2.0 | |
| Peso (kg) | 184 | |
| Precisión de posicionamiento (mm,°) | ±10/±1 | |
| Tiempo de carga (h) | ≤1,5 | |
| Modo de conducción | accionamiento diferencial |
CARACTERÍSTICAS DE Carretilla elevadora AGV
Aplicaciones




Add: NO.409 West Jianshe Road, Economic Development Zone, Jinhu County, Jiangsu Province, China
Continúe leyendo, manténgase informado, suscríbase y le invitamos a que nos cuente lo que piensa.



Derechos de autor
2026@ Jiangsu Kingmore Storage Equipment Manufacturing Co., Ltd Reservados todos los derechos.
mapa del sitio
| Blog
| Xml
| política de privacidad
 RED SOPORTADA
RED SOPORTADA
 español
español English
English 日本語
日本語 한국의
한국의 Deutsch
Deutsch français
français العربية
العربية português
português 中文
中文 русский
русский